 (You may need to click on the image to read the text.)
(You may need to click on the image to read the text.)
I’m not generally someone who spends a ton of time making worldbuilding documents separate from the comics themselves, but considering that I have a whole ref sheet just for Sergio’s leg(s) it seemed worth it to post a little about how his in particular works.
Also take some of this with a grain of salt- I’m not someone who uses prosthetics, just a weird nerd. There’s a decent chance that I’ve overlooked something that I’ll have to figure out later on.
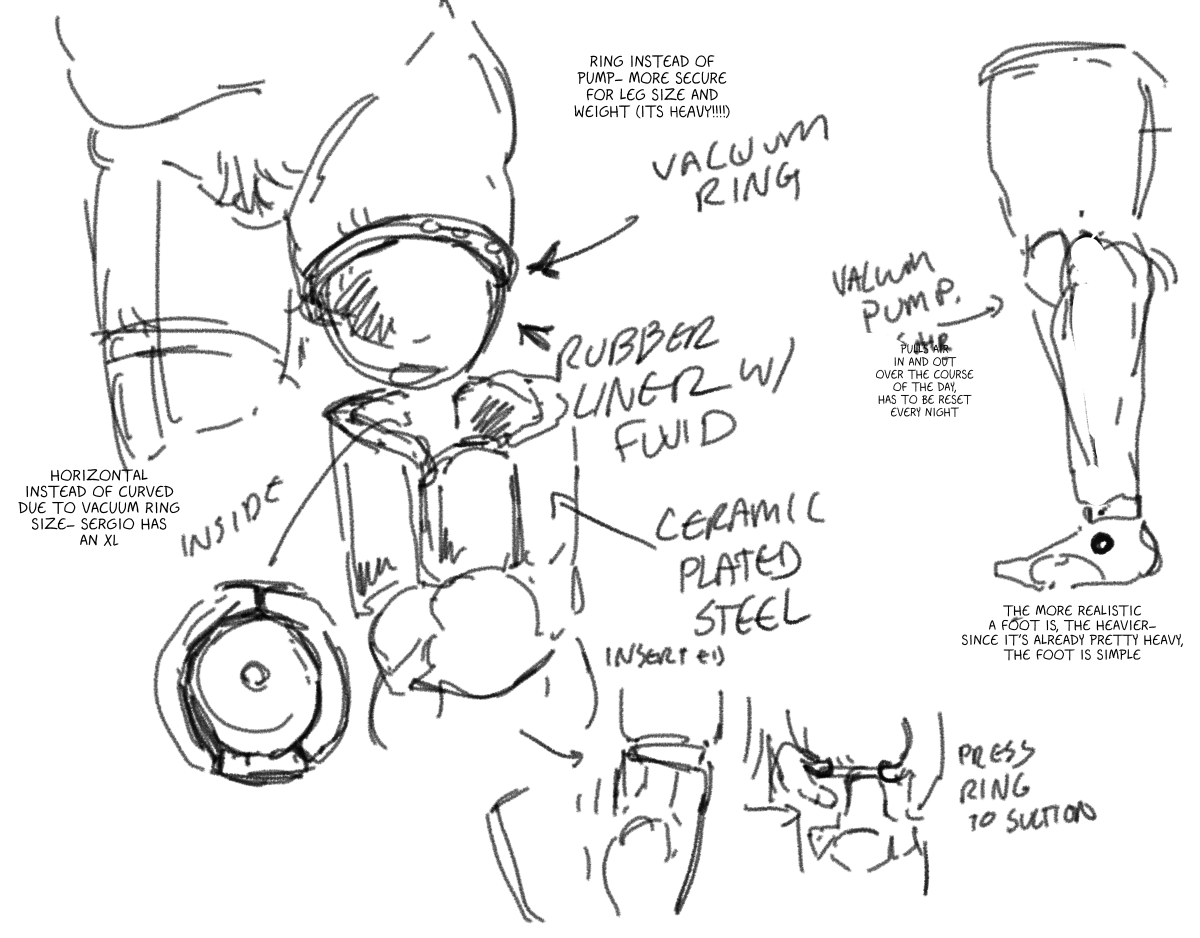
One of the three systems that actual real people with over the knee/above knee prosthetic legs depend on is a vacuum system (the other two, shuttle lock and suction, aren’t the best choice for very active people). Vacuum systems use a motorized valve that sucks the air out of the socket after their limb has been properly fitted with layered liners of rubber/fabric. The vacuum unit itself goes under the limb and above where the knee would be.
Sergio’s vacuum unit goes around the top edge of the leg to even out the weight of his heavier prosthetic (average for above the knee limb replacements is 8-10 lbs / 3.5-4.5kg, and Sergio’s is about 20-22 lbs / 9-10kg) so it isn’t entirely relying on the bottom-up direction of regular suction (suction units have a harder time keeping even suction for fatter people). The downside to this is that the ring is permanently a part of his leg unless he gets surgery, but that’s probably the least of his issues.
It also needs to be re-calibrated when taking legs off/on. Instead of relying on weight/general vacuum pressure from him standing up, it relies on the user’s ability to allow a tool to become a part of themselves (distal attribution I think?? There’s a better word for this), the part of the brain that experiences supernumary phantom limbs, and using combined chemical feedback/chemical waste prediction from the brain to understand how the limb needs to behave. It combines predictive learning with chemical measurements picked up from blood. A human leg that’s the correct height and weight as to what the user is used to makes sense, having to re-understand how your body will potentially move if you’re given dog legs is more of a struggle.
The liner he uses is a double layer of hydrophobic material (I originally wrote rubber but realized that probably isn’t the best choice, lol) with a layer of water between. Water has a high heat capacity, so this absorbs a lot of heat generated by Sergio’s body and joints during the day to day to keep the temperature from rising too much. Sweating can compromise the vacuum seal which is why temperature control is important, but the hydrophobic material keeps it contained so he just… dumps out sweat every few hours on hot days. Gross.
His legs are primarily steel plated in ceramic, with some of the joint elements being 100% ceramic to avoid potential heat reflection from friction. The downside to this is they’re more likely to crack, but a small piece isn’t too difficult to get a cheap replacement for. Sergio is on enough replacements to have a Leg of Theseus at this point, really.